Indice
Temporary notes
>>> Shared link to the live session <<<
I will introduce the MSC.Marc/Mentat finite element solver, which is installed on the virtual machine presented below. Please check that you are able to boot up the virtual machine, and that the present website is reachable from within the virtual machine itself (i.e. that the v.m. is online).
Intro
Me and the course. Videos (may require a further login).
An Outline (rev.b) for a lab exercise , and the related videos . The maxima worksheet at various stages (1, 2, 3, 4), maxima videos. A link.
Torsional stiffness for a simplified ladder-frame chassis (was: “a further Lab exercise”)
Cross Sectional properties through FE Analysis
A stress concentration factor example
Basic theory of plates (and shells): pdf, updated version "d", v0101-xxxx.zip v0101-xxxy.zip
Finite Elements:
- Interpolation functions for the quadrilateral domain: d020xb.pdf v0201.zip
- Quadrature rules for the quadrilateral domain: v0202.zip.
- The bilinear isoparametric shear-deformable shell element: d0211a.pdf v0211-xxxx.zip
- shear locking v0212-xxxx.zip
- Assembly (missing)
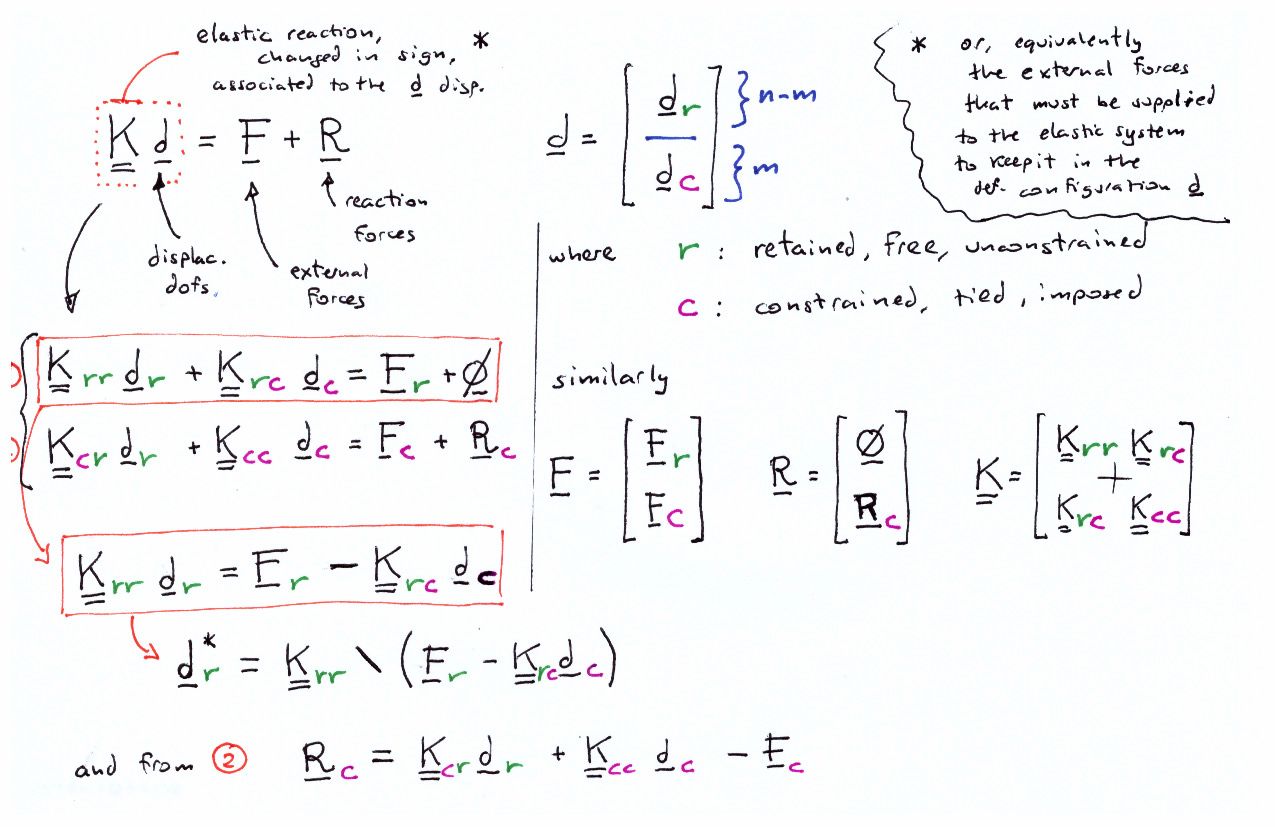
- Constraints, and problem solution (missing)
- inertia relief: master.pdf
- Advanced modeling tools: i0201.jpg
- Links:
- Dynamic loadacases: Please read the dynamics in a nutshell summary, and check that you understand every passage; ask otherwise.
- A model to discuss the peculiar nature of the drilling d.o.f.;
- Buckling: dispensa_2018_v2019-06-06_lpb.pdf
Virtual machine for the lab sessions
A newer virtual machine, which also contains the MSC.Adams 2017.2 software employed in dedicated Vehicle Dynamics seminars, is available here.

{kind=link}
Lecture notes
Lecture notes contain parts that were not discussed in the recorded lessons; those parts will not be asked during the exam. Also, lecture notes will be subjected to improvement where appropriate.
- lecturenotes_2020-06-05a.pdf, first attempt for a final version;
Exam
Notes for the exam.
The exam will consist of an interview of approximate 30-40 minutes in which you will be asked to
- comment, modify or complete finite element models in the MSC.Marc / Mentat environment, chosen - with possible variations - among those carried out in class or proposed as wikifemfuchde2020:examExercises.
- comment, modify or complete maxima spreadsheets chosen - with possible variations - among those carried out in class or proposed as wikifemfuchde2020:examExercises.
- answer a couple of theoretical questions, according to the final detailed program (which will be uploaded as soon as the lessons are completed). An authorized cheatsheet will be provided for use during the test, reporting the most relevant formulas from the PDF handouts, but no comments.
Technical details will be provided for sharing a graphical terminal on which you may operate jointly with the teacher, together with the links for accessing the exam sessions.
The student is also asked to prepare paper and stationery in order illustrate the answers with drawings and graphics; these sketches will then be shown at the webcam, or sent via instant messaging (google hangout with unimore account login is ok) from a mobile phone.
According to the current organization, exam sessions have been opened on every Friday in June / July, with a further turn on the subsequent Monday, if needed.
To guarantee each student the access to at least one exam session in June and one exam session in July (see teaching regulations), students are asked to refrain from enrolling to more than one exam session in two weeks (for example, if a student signs up for the June 26 session, he will refrain from signing up for the subsequent July 3 session), and more than three sessions in two months.
Discussione
Hi, this is a discussion board. Once logged in, you may post here questions about the obscure lesson points that need clarification. The teacher will treat those point in dedicated addenda.
Q&A of a student with respect to the beam theory, if it may be useful to someone else.
Q: How does the user decide the orientation of vector v, which is used to define the local axis system?
A: It depends on the specific kind of profile you want to represent. Consider the following example. We have an elliptic, thin walled cross section, and, in the cross sectional view, the first local axis 1 is aligned with the minor ellipse semi-axis.
Now, in a global xyz reference system, the profile axis is aligned with the global x axis. If we set v=(0,0,-1), the profile cross sections are oriented such that their minor semi-axis is parallel to the global z, whereas their major semi-axis is aligned with the global y. If we set, instead, v=(0,1,0) the cross sections are globally rotated in space by 90° around the profile axis with respect to the previous configuration.
Q: What does the force F and I represent , why are they called auxiliary/fictitious ?
A: Since the Castigliano second theorem allows the deflection evaluation only in correspondence of an external force, an external force has to be added at points whose deflection is under scrutiny, even if the original load case does not consider such a load.
Obviously, the magnitude of such a spuriously added force has to be imposed zero.
Those forces, which were added just to perform the deflection calculations, are hence named “auxiliary”, and are “fictitious”, or “spurious” in nature.
Questions of a student with respect to the ladder frame chassis maxima worksheet, and answers, if they may be useful to someone else.
In general, it's the inverse of the stiffness. It is usually defined as the magnitude ratio between a deflection and the applied external action that induces it.
It was an arbitrary choice. A few worksheet versions ago ThetaD was the internal action component kept parametric. Such a choice might only affect the complexity of the algebraic expressions, think e.g. how would they appear if the parametric internal action component were the vertical shear force at the midspan of the modeled profile portion.
The linsolve command treats its first argument as an equation; in the absence of an explicit “=” sign, the supplied expression is assumed to be equated to zero. You may think that a “=0” suffix is appended in the absence of an “=” sign.
Those (chi1, chi2, chi12) terms are corrective factors for the shear stress/strain contribution to the internal energy lineic density. They account for the deviation between the pointwise shear stress value and its [shear force]/[cross. sec. area] average. In the last two live streaming lessons we evaluated those factors for the “almost closed” OTW profile analyzed in torsion.
You're right. Such a term is simplified away in the “ts” definition at %i21.
Yes. The “N” internal action component is symmetric with respect to the plane the structure lies on, and it is zero for purely skew-symmetrical load cases.
Shear stresses and the first variation of the bending moment along the beam axis are both caused by the presence of a nonzero shear force. On the pointwise scale, the equilibrium equation for the infinitesimal cube also relates the first variation in z of the sigma_z stresses with the first variation in y (or, x) of the tau_yz (or, tau_zx) stresses. The (arm-weighted) accumulation of the sigma_z stresses along the cross section generates the bending moment, and the accumulation of the tau_yz (tau_xz) stresses generates the Q_y (Q_x) shear forces. Nonuniform bending is observable in straight beam in (and only in) the presence of nonzero shear force.
The same vertical shift “2f” of the two profile ends may be obtained both through an S shaped purely flexural deformation, e.g. with a transverse deflection v(z)=-(f*z*(z^2-3*a^2))/(2*a^3), z in [-a,+a] (try to plot it), or through a constant slope, card deck like shift of the cross sections, which is due to pure shear. The least resistance path between those two options is actually followed.
sorry but I have so many slightly different versions of the worksheet that I lost which passages are actually numbered %i48 and %i52 in yours. In general, if one of the sources of compliance – namely, the torsional compliance, the bending compliance, the shear compliance – is amplified in magnitude, or inhibited, the overall compliance follows such a variation according to a scaling factor which is in the between 0 and 1; such a factor may be discussed based on the proposed “spring in series / in parallel” sketch, and on the relative weigth of the single sources of compliance along the various elastic support paths.