Indice
a cura di Edoardo Maletti, Maria Giordano, Francesco Casini, Matteo Montagnani
*nota iniziale
La matrice $\underline{\underline{L}}$(ξ,η) contiene la matrice $\underline{\underline{J}}^{^{-t}}$ i cui elementi sono tutti funzioni fratte di ξ ed η. Per calcolare la matrice inversa infatti si divide per il determinante della matrice da invertire, che in questo caso sarà un espressione contenente ξ,η, ξ*η.
$det|\underline{\underline{J}}^{t}|=\frac{\partial x}{\partial \xi }*\frac{\partial y}{\partial \eta }-\frac{\partial x}{\partial \eta }*\frac{\partial y}{\partial \xi }$
es. $ \frac{\partial x}{\partial \xi }=\sum_{i=1}^{4}\frac{\partial N_{i}}{\partial \xi }(\xi,\eta)*x_{i}=f(\eta)$
$\Rightarrow det|\underline{\underline{J}}^{^{t}}| =f(\xi,\eta,\xi*\eta)$
significa quindi che $\underline{\underline{L}}$(ξ,η) non è lineare in ξ ed η ma razionale fratta
TENSIONI(sull’elemento piastra n°75)
Dalla teoria è noto che $\underline{\sigma}=\underline{\underline{D}} \, \underline{\epsilon}(\xi,\eta,z)$ con
$\underline{\underline{D}}=\frac{E}{1-\nu }\begin{bmatrix}
1 & \nu & 0
\nu & 1 & 0
0 & 0 & \frac{1-\nu }{2}
\end{bmatrix}$
Tutti i termini sono noti, quindi il calcolo delle sigma è immediato Non si può dire che valga lo stesso per le componenti tensionali fuori-piano $\tau _{zx}$ e $\tau _{zy}$. si consideri lo spessore della piastra, e si assuma che il materiale sia ortotropo, con x y e z assi principali di ortotropia. Secondo la teoria di Jourawsky, le tensioni fuori piano dovrebbero risultare costanti su tutto lo spessore dell’elemento, e sarebbero: $\tau _{zx}= \bar{\gamma}_{zx}\: G_{zx}$ $\tau _{zy}= \bar{\gamma}_{zy}\: G_{zy}$ con $\bar{\gamma}_{zx}$ =deformazione media costante sullo spessore.
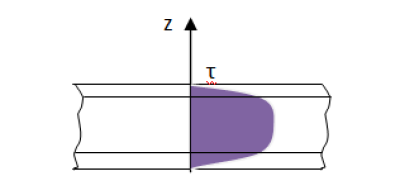
Tuttavia, se le tau fossero realmente costanti, ci si ritroverebbe con una tensione diversa da zero in corrispondenza della faccia a pelo libero della piastra, il che risulta assurdo. Si deduce quindi un andamento non costante, ed in particolare parabolico, delle tau sullo spessore, al quale consegue un andamento simile scalato di un fattore G_(z*) costante delle deformazioni gamma.
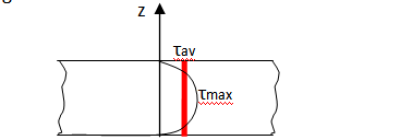
In particolare, risulta che la tau massima è 3/2 della tau media equivalente. Se invece si intende calcolare l’energia potenziale elastica delle tensioni taglianti nell’elemento piastra, occorre passare dalla tau media “dinamica” alla tau media energeticamente equivalente. L’energia interna calcolata sul solo spessore vale:
$\frac{dU}{dA}=\frac{1}{2}\int_{h}(\tau _{zx}\gamma _{zx}+\tau _{zy}\gamma _{zy})dz$
In questa formula sono state utilizzate le tau e le gamma reali sullo spessore.
Sarebbe gradito che il risultato dell’integrale valesse $\frac{dU}{dA}=\frac{1}{2}(\bar{\tau} _{zx}\bar{\gamma} _{zx}+\bar{\tau} _{zy}\bar{\gamma} _{zy})h$ in modo da poter usare nel calcolo la tau media, più semplice da gestire.
In effetti è possibile ricondursi a questa forma impiegando un coefficiente 6/5 che scali il valore di tau media dinamica a tau media energeticamente equivalente.
Definita $\underline{\underline{D}}=\begin{bmatrix}
G_{zx} & 0
0& G_{zy}
\end{bmatrix}$
ho che $\underline{\tau}=\underline{\underline{D}}\: \underline{\gamma}$ dove tensioni e deformazioni sono quelle medie dinamiche, le uniche che mi consentano di utilizzare il coefficiente G per ricavare t. Da questa formula ricavo:
$\underline{\overline{\tau}}=\frac{6}{5}\underline{\underline{D}}\: \underline{\overline{\gamma}}=\underline{\underline{\overline{D}}}\: \underline{\overline{\gamma}}$
Se non moltiplicassi per 6/5 la tau media dinamica avrei un deficit di energia nel risultato finale.
* PANNELLO SANDWICH
 In un pannello sandwich la distribuzione delle tau non risulta parabolica, o per meglio dire, lo è su ogni singolo strato ma non sull'intero spessore. Nelle due piastre di materiale più resistente si concentra la quasi totalità di crescita delle tau, mentre nella parte centrale l'andamento è quasi costante. Il risultato è un fattore correttivo molto prossimo all'unità.
In un pannello sandwich la distribuzione delle tau non risulta parabolica, o per meglio dire, lo è su ogni singolo strato ma non sull'intero spessore. Nelle due piastre di materiale più resistente si concentra la quasi totalità di crescita delle tau, mentre nella parte centrale l'andamento è quasi costante. Il risultato è un fattore correttivo molto prossimo all'unità.
Un andamento simile si riscontra in un pannello monomateriale precedentemente incrudito da un momento flettente puro; in questa condizione a causa del Mf le fibre estremali del pannello, ovvero quelle lontane dall'asse neutro, si plasticizzano mentre quelle interne, ovvero quelle in prossimità dell'asse neutro che risultano dunque meno tensionate, si deformano elasticamente. Questa plasticizzazione differenziale sullo spessore del pannello provoca in seguito una diversa reattività agli sforzi a seconda della zona presa in esame.
MATRICE RIGIDEZZA (elemento piastra n°75)
Noti $\bar{\sigma}$ ed $\bar{\epsilon}(\xi,\eta,z)$ ed i 20 gradi di libertà (5 per ogni nodo), raccolti nel vettore d, si applica il principio dei lavori virtuali per ricavare la matrice rigidezza dell'elemento. Per completezza, si riporta l'enunciato di tale principio (Fondamenti di costruzione di macchina di Antonio Strozzi):
“Se ad un continuo deformabile ed in equilibrio sotto l'azione di forze imposte, comprese le reazioni vincolari, viene assegnato un generico campo di spostamenti virtuale infinitesimo compatibile con la possibilità di deformarsi del continuo […], allora il lavoro virtuale esterno, cioè il lavoro virtuale esterno, cioè il lavoro compiuto da tali forze relativamente al campo di spostamenti, eguaglia il lavoro virtuale interno, che le tensioni dovute a tali forze compiono in virtù delle deformazioni conseguenti al campo virtuale di spostamenti”
Si definisce una d configurazione deformata iniziale di riferimento, la quale possiede un proprio valore che non deve per forza essere zero. Si applica al sistema uno spostamento virtuale $δ\underline{d}$, con δ infinitesimo (permette di eliminare tutti gli infinitesimi di ordine superiore dalle formule), ed in grado di privare l'evoluzione del sistema da una dimensione temporale (considerazione che torna utile solamente se i vincoli sono dipendenti dal tempo). Nell'elemento piastra a 4 nodi non ci sono vincoli esterni all'applicazione di un δ, mentre sono numerosi quelli interni:
- Rispettare la cinematica delle piastre
- rispettare l'interpolazione della rototraslazione dei nodi
Applicando δ l'elemento si porterà nella configurazione $\underline{d}+δ\underline{d}$.
Si parta studiando il lavoro delle forze esterne. Si suppone siano applicate ai nodi: se non dovessero esserlo, come ad esempio nel caso di un caricamento distribuito, si possono sempre ricavare le risultanti puntuali. Definisco il vettore delle 20 forze esterne applicate ai 4 nodi (si utilizza il pedice i per sottolineare il fatto che siano ognuna un vettore di 4 forze applicate ai 4 nodi).
$\underline{\underline{F}}=\begin{bmatrix}
\underline{U_{i}},
\underline{V_{i}},
\underline{W_{i}},
\underline{\Theta _{i}},
\underline{\Phi _{i}}
\end{bmatrix}^{T}$
- osservazione:
applicando uno spostamento, seppur infinitesimo, ad un nodo, non si rischia che la forza ad esso associata vari? NO, perché U varia in funzione di u con infinitesimi di ordine superiore a δu
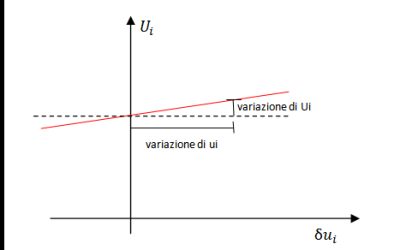
Si ottiene quindi, per le forze esterne:
$\delta Q_{e}=\delta\underline{d}^{T}\underline{F}$
Ci si concentri ora sulle forze interne. In realtà non si ha a che fare con forze ma con tensioni τ e σ, ognuna delle quali dà un contributo al lavoro virtuale interno. Dalla teoria è noto che il lavoro interno equivale all'integrale sul volume del prodotto tra tensione e deformazione associata.
$\delta Q_{i}^{\sigma}=\iint_{A}\int_{h}\delta \underline{\epsilon}^{T}\underline{\sigma}\: dh \: dA$
$=\int_{V}[(\underline{\underline{B_{0}}}(\xi,\eta)+\underline{\underline{B_{1}}}(\xi,\eta)z)\delta \underline{d}]^{T}\: \underline{\underline{D}}\: (\underline{\underline{B_{0}}}(\xi,\eta)+\underline{\underline{B_{1}}}(\xi,\eta)z)\: \underline{d}\: dV$
Poiché $\underline{d}$ è un vettore di costanti, non dipende dall'integrale e posso estrarlo
$=\delta \underline{d}^{T}[\int_{V}(\underline{\underline{B_{0}}}(\xi,\eta)+\underline{\underline{B_{1}}}(\xi,\eta)z)^{T}\: \underline{\underline{D}}\:(\underline{\underline{B_{0}}}(\xi,\eta)+\underline{\underline{B_{1}}}(\xi,\eta)z)\: dV]\: \underline{d}$
$=\delta \underline{d}^{T}\: \underline{\underline{K_{\sigma}}}\: \underline{d}$
$\underline{\underline{K_{\sigma}}}$ si ricava risolvendo numericamente l'integrale applicando la regola di Cavalieri-Simpson sullo spessore e la quadratura gaussiana sugli assi x ed y (si veda il capitolo finale)
Viene fatto lo stesso per le tau:
$\delta Q_{i}^{\gamma}=\iint_{A}\int_{h}\delta \underline{\bar{\gamma}}^{T}\: \underline{\bar{\tau}}\: dz\: dA$
con $\underline{\bar{\tau}}\$=tau media energeticamente equivalente
$=\int_{V}\delta \underline{d}^{T}\: \underline{\underline{B}}_{\gamma}(\xi,\eta)^{T}\: \underline{\underline{D}}_{\gamma}\: \underline{\underline{B}}_{\gamma}(\xi,\eta)\:\underline{d}\: dV$
$=\delta \underline{d}^{T}\:\int_{V}\underline{\underline{B}}_{\gamma}(\xi,\eta)^{T}\: \underline{\underline{D}}_{\gamma}\:\underline{\underline{B}}_{\gamma}(\xi,\eta)\: dV\: \underline{d}$
$=\delta \underline{d}^{T}\:\underline{\underline{K}}_{\gamma}\: \underline{d}$
Per ricavare il lavoro interno totale sommo le due componenti ricavate:
$\delta Q_{i}=\delta Q_{i}^{\sigma}+\delta Q_{i}^{\gamma}=\delta \underline{d}^{T}\: (\underline{\underline{K}}_{\sigma}+\underline{\underline{K}}_{\gamma})\: \underline{d}=\delta \underline{d}^{T}\:\underline{\underline{K}}\: \underline{d}$
Applico infine il principio dei lavori virtuali:
$\delta Q_{e}=\delta \underline{d}^{T}\:\underline{F}=\delta \underline{d}^{T}\: \underline{\underline{K}}\:\underline{d}= \delta Q_{i}$
$\underline{F}=\underline{\underline{K}}\:\underline{d}$
$\underline{\underline{K}}$=matrice rigidezza dell'elemento piastra. E' simmetrica semidefinita positiva
$\underline{\underline{K}}\:\underline{d}$=Forza da applicare esternamente per bilanciare le reazioni elastiche (in pratica, reazioni elastiche cambiate di segno)
INTEGRAZIONE (del lavoro delle tensioni interne sul volume dell'elemento piastra)
Integrazione sullo spessore
Si applica la formula di Cavalieri-Simpson, ovvero, campionati 3 punti sullo spessore (TOP-MIDDLE-BOTTOM):
$\int_{h}f(z)dz\approx [\frac{1}{6}f(top)+\frac{4}{6}f(mid)+\frac{1}{6}f(bot)]h$

in caso di piastre multistrato, vengono campionati tre punti per ogni strato; ciò significa che su ogni interfaccia vengono presi due punti, uno col valore del materiale sopra e uno col valore del materiale sotto
Quadratura Gaussiana
Dato un dominio, si definisce la funzione integranda rispetto ad una variabile adimensionale (nel caso della piastra si prenda la coordinata ξ) e la si integri come somma dei valori della funzione pesata in n punti di discretizzazione del dominio.
$\int_{-1}^{1}f(\xi)d\xi\approx \sum_{i=1}^{n}f(\xi_{i})\omega_{i}$
*es: La formula di Cavalieri-Simpson nasce da qui, con n=3, $\xi_{1}=-1\; ,\; \xi_{2}=0\; ,\;\xi_{3}=1\; ,\;\omega_{1}=\frac{1}{6}\; ,\;\omega_{2}=\frac{4}{6}\; ,\;\omega_{3}=\frac{1}{6}$ *
Si vuole trovare un metodo di integrazione per polinomi di basso ordine che dia errore nullo. Purtroppo per ricavare la matrice rigidezza si integra una funzione razionale fratta e non una lineare (sempre a causa di $\underline{\underline{J}}^{-T}$). Tuttavia vale che, se il metodo funziona bene (errore=0) su polinomi, allora sarà accettabile anche per funzioni che si riescono a ridurre a polinomi a meno di piccoli errori (il metodo, cioè, non amplifica eventuali errori legati alla linearizzazione).
Si definisce il polinomio p(ξ) di ordine m che linearizza la f(ξ)
$p(\xi)\cong a_{m}\: \xi^{m}+a_{m-1}\: \xi^{m-1}+...+a_{1}\: \xi+a_{0}$
il cui integrale esatto vale
$\int_{-1}^{1}p(\xi)d\xi=\sum_{j=0}^{m}\frac{(-1)^{j}+1}{j+1}a_{j}$
Si definisce il residuo tra la somma pesata dei valori puntuali della funzione e l'integrale esatto come:
$r(a_{j},(\xi_{i},\omega_{i}))\cong \sum_{i=1}^{n}p(\xi_{i})\omega_{i}-\int_{-1}^{1}p(\xi)d\xi$
La regola di integrazione si dice ottimale se:
- r=0
- $\not{\exists}$ una regola di ordine m' inferiore che riesce ad annullare il residuo
E' immediato notare che tutte le regole integrano in maniera ottimale il polinomio che ha $a_{j}=0 \; \; \; \forall j$. Partendo da qui si può richiedere che variando $a_{j}$ (rendendoli cioè diversi da zero) il residuo non cresca, imponendo la $\frac{\partial r}{\partial a_{j}}$ nulla per ogni j. Si ottiene così un sistema di m+1 equazioni non lineari indipendenti(suona strano parlare di lineare indipendenza tra funzioni non lineari, però in questo caso si verifica una cosa simile), un'equazione per ogni $a_{j}$, nelle 2n incognite $\xi_{i},\omega_{i}$, con i che varia tra 1 ed n (le incognite sono cioè le coordinate degli n punti di campionamento ed i mesi della funzione in quei punti). Se m<2n-1 il sistema è sovradeterminato e non ha soluzione: occorre quindi rispettare la condizione m=2n+1.
Si procede ora nella trattazione andando ad osservare il caso specifico dell'elemento piastra con n=2. n=2 ⇒ m=3 $p(\xi)=a_{3}\xi^{3}+a_{2}\xi^{2}+a_{1}\xi+a_{0}$ $\int_{-1}^{1}p(\xi)d\xi=\frac{2}{3}a_{2}+2a_{0}$ $r=a_{3}(\omega_{1}\xi_{1}^{3}+\omega_{2}\xi_{2}^{3})+a_{2}(\omega_{1}\xi_{1}^{2}+\omega_{2}\xi_{2}^{2}-\frac{2}{3})+a_{1}(\omega_{1}\xi_{1}+\omega_{2}\xi_{2})+a_{0}(\omega_{1}+\omega_{2}-2)$ Impongo che al variare dei coefficienti a il residuo resti nullo:
$\left\{\begin{matrix}
\frac{\partial r}{\partial a_{3}}=\omega_{1}\xi_{1}^{3}+\omega_{2}\xi_{2}^{3}=0;
\frac{\partial r}{\partial a_{2}}=\omega_{1}\xi_{1}^{2}+\omega_{2}\xi_{2}^{2}-\frac{2}{3}=0;
\frac{\partial r}{\partial a_{1}}=\omega_{1}\xi_{1}+\omega_{2}\xi_{2}=0;
\frac{\partial r}{\partial a_{0}}=\omega_{1}+\omega_{2}-2=0
\end{matrix}\right.$
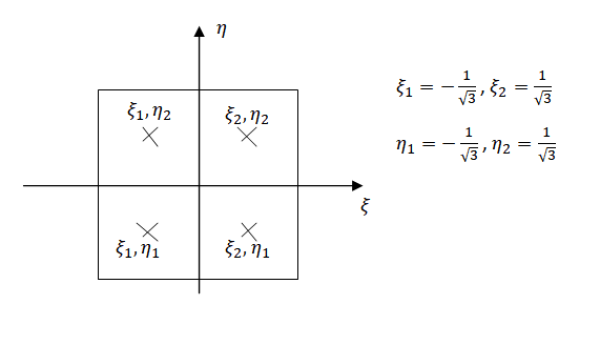
Le soluzioni possibili sono 2, identiche con i segni invertiti: $omega_{1}=1,\; omega_{2}=1,\; \xi_{1}=\frac{1}{-\sqrt{3}},\; \xi_{2}=\frac{1}{\sqrt{3}}$
 (immagine tratta dalla dispensa del corso)
(immagine tratta dalla dispensa del corso)
E' importante che i punti di campionamento siano:
- simmetrici rispetto all'origine
- mai in ξ=±1
Quando si lavora con elementi piastra l'integrazione viene fatta sui due assi ξ ed η; vengono quindi presi 2 punti di campionamento per ogni asse, il che significa un totale di 4 punti sull'area dell'elemento.
FINE